mm-Wave Localizers:
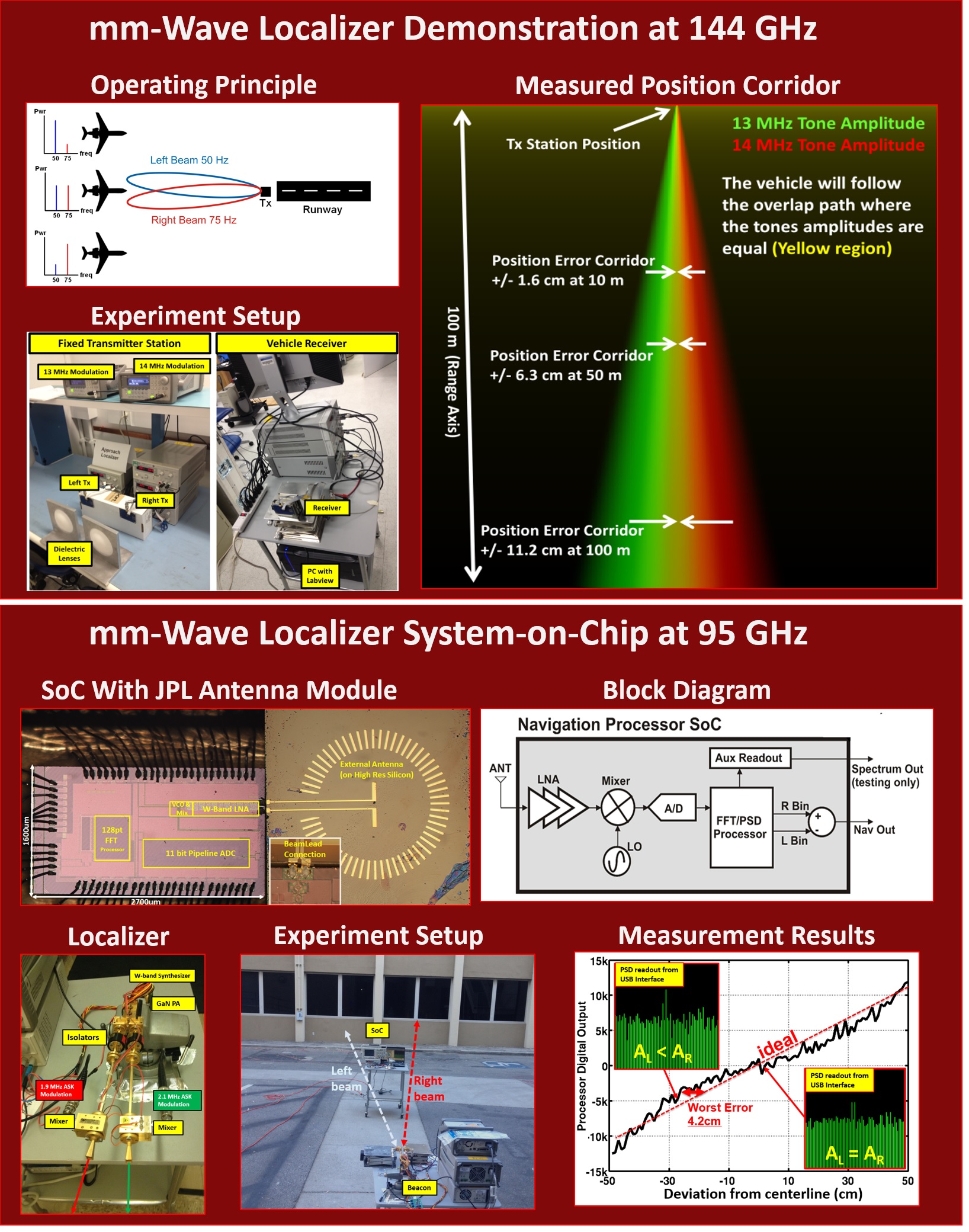
This idea was fairly simple, take the ILS (Instrument Landing System) that is used at every US airport and scale it to mm-wave frequencies to get higher positional accuarcy. The purpose of ILS is to align a landing aircraft to a runway in order to prevent it front hitting obstacles or buildings, and so the pilots can land in bad weather without actually seeing the runway. It works by sending two beams from two antennas which have the same carrier, but different modulations. By comparing the amplitude of each modulation the centerline is detected. The potential applications I am thinking about are navigation of very small UAVs and UGVs (unmanned ground vehicles) around cluttered environments like indoor parking sturctures or even inside buildings. Further out we have some concept applications for helping to guide landers and rovers on Mars (and maybe someday Europa?).
In the navigation and localization effort we have done two demonstrations so far:
- A low cost proof of concept system with commerically available mm-wave transceviers and a computer to do the signal processing. A short video demonstration of this one to show the concept is here: [nav_video]
- A dedicated SoC with all the receiver and processing (ADC + FFT + Position processor) co-integrated into a single chip.
|